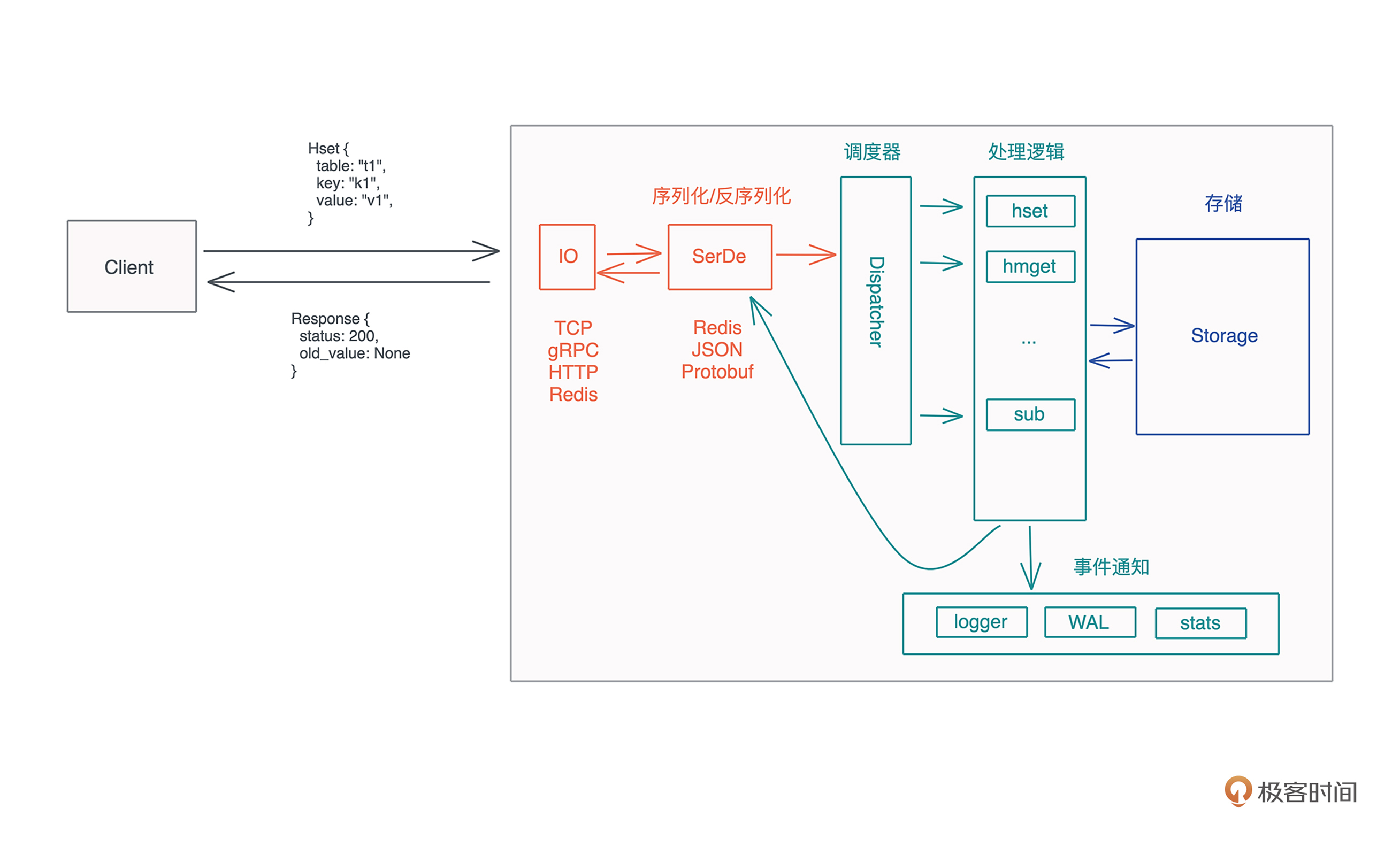
一、基本流程
Summarize
本文主要介绍了如何设计一个 KV server,从需求分析、基本流程、架构和设计等方面进行了讲解。
- 文章首先介绍了 KV server 的需求,然后通过一个简单的实现来说明过程式代码的缺点。
- 接着,文章提出了好的实现应该:
- 从系统的主流程开始,搞清楚从客户端的请求到最终客户端收到响应,都会经过哪些主要的步骤
- 然后根据这些步骤,思考哪些东西需要延迟绑定,构建主要的接口和 trait。
- 最后,文章介绍了客户端和服务器之间的协议、服务器和命令处理流程的接口、服务器和存储的接口等几个重要的接口,并使用 protobuf 定义了第一版支持的客户端命令。
为什么选 KV server 来实操呢?
因为它是一个足够简单又足够复杂的服务。
基础需求梳理
参考工作中用到的 Redis / Memcached 等服务,来梳理它的需求:
-
最核心的功能是根据不同的命令进行诸如数据存贮、读取、监听等操作;
-
而客户端要能通过网络访问 KV server,发送包含命令的请求,得到结果;
-
数据要能根据需要,存储在内存中或者持久化到磁盘上。
先来一个短平糙的实现
如果是为了完成任务构建 KV server,其实最初的版本两三百行代码就可以搞定,但是这样的代码以后维护起来就是灾难。
例子: 一个过程式的意大利版本
我们看一个省却了不少细节的意大利面条式的版本,你可以随着我的注释重点看流程:
use anyhow::Result; use async_prost::AsyncProstStream; use dashmap::DashMap; use futures::prelude::*; use kv::{ command_request::RequestData, CommandRequest, CommandResponse, Hset, KvError, Kvpair, Value, }; use std::sync::Arc; use tokio::net::TcpListener; use tracing::info; #[tokio::main] async fn main() -> Result<()> { // 初始化日志 tracing_subscriber::fmt::init(); let addr = "127.0.0.1:9527"; let listener = TcpListener::bind(addr).await?; info!("Start listening on {}", addr); // 使用 DashMap 创建放在内存中的 kv store let table: Arc<DashMap<String, Value>> = Arc::new(DashMap::new()); loop { // 得到一个客户端请求 let (stream, addr) = listener.accept().await?; info!("Client {:?} connected", addr); // 复制 db,让它在 tokio 任务中可以使用 let db = table.clone(); // 创建一个 tokio 任务处理这个客户端 tokio::spawn(async move { // 使用 AsyncProstStream 来处理 TCP Frame // Frame: 两字节 frame 长度,后面是 protobuf 二进制 let mut stream = AsyncProstStream::<_, CommandRequest, CommandResponse, _>::from(stream).for_async(); // 从 stream 里取下一个消息(拿出来后已经自动 decode 了) while let Some(Ok(msg)) = stream.next().await { info!("Got a new command: {:?}", msg); let resp: CommandResponse = match msg.request_data { // 为演示我们就处理 HSET Some(RequestData::Hset(cmd)) => hset(cmd, &db), // 其它暂不处理 _ => unimplemented!(), }; info!("Got response: {:?}", resp); // 把 CommandResponse 发送给客户端 stream.send(resp).await.unwrap(); } }); } } // 处理 hset 命令 fn hset(cmd: Hset, db: &DashMap<String, Value>) -> CommandResponse { match cmd.pair { Some(Kvpair { key, value: Some(v), }) => { // 往 db 里写入 let old = db.insert(key, v).unwrap_or_default(); // 把 value 转换成 CommandResponse old.into() } v => KvError::InvalidCommand(format!("hset: {:?}", v)).into(), } }
这段代码非常地平铺直叙,从输入到输出,一蹴而就,如果这样写,任务确实能很快完成,但是它有种“完成之后,哪管洪水滔天”的感觉。
你复制代码后,打开两个窗口,分别运行
cargo run --example naive_server
和
cargo run --example client
就可以看到运行 server 的窗口有如下打印:
Sep 19 22:25:34.016 INFO naive_server: Start listening on 127.0.0.1:9527
Sep 19 22:25:38.401 INFO naive_server: Client 127.0.0.1:51650 connected
Sep 19 22:25:38.401 INFO naive_server: Got a new command: CommandRequest { request_data: Some(Hset(Hset { table: "table1", pair: Some(Kvpair { key: "hello", value: Some(Value { value: Some(String("world")) }) }) })) }
Sep 19 22:25:38.401 INFO naive_server: Got response: CommandResponse { status: 200, message: "", values: [Value { value: None }], pairs: [] }
警告⚠️: 耦合严重
虽然整体功能算是搞定了,不过以后想继续为这个 KV server 增加新的功能,就需要来来回回改这段代码。
此外,也不好做单元测试,因为所有的逻辑都被压缩在一起了,没有“单元”可言。虽然未来可以逐步把不同的逻辑分离到不同的函数,使主流程尽可能简单一些。但是,它们依旧是耦合在一起的,如果不做大的重构,还是解决不了实质的问题。
所以不管用什么语言开发,这样的代码都是我们要极力避免的,不光自己不要这么写,code review 遇到别人这么写也要严格地揪出来。
架构和设计
那么,怎样才算是好的实现呢?
好的实现应该是:
- 在分析完需求后,首先从系统的主流程开始,搞清楚从客户端的请求到最终客户端收到响应,都会经过哪些主要的步骤;
- 然后根据这些步骤,思考哪些东西需要延迟绑定,构建主要的接口和 trait;
- 等这些东西深思熟虑之后,最后再考虑实现。也就是所谓的“谋定而后动”。
笔记:这个流程中有一些关键问题需要进一步探索
- 客户端和服务器用什么协议通信?TCP?gRPC?HTTP?支持一种还是多种?
- 客户端和服务器之间交互的应用层协议如何定义?怎么做序列化 / 反序列化?是用 Protobuf、JSON 还是 Redis RESP?或者也可以支持多种?
- 具体的处理逻辑中,需不需要加 hook,在处理过程中发布一些事件,让其他流程可以得到通知,进行额外的处理?这些 hook 可不可以提前终止整个流程的处理?
- 对于存储,要支持不同的存储引擎么?比如 MemDB(内存)、RocksDB(磁盘)、SledDB(磁盘)等。对于 MemDB,我们考虑支持 WAL(Write-Ahead Log) 和 snapshot 么?
- 整个系统可以配置么?比如服务使用哪个端口、哪个存储引擎?
如果你想做好架构,那么,问出这些问题,并且找到这些问题的答案就很重要。值得注意的是,这里面很多问题产品经理并不能帮你回答,或者 TA 的回答会将你带入歧路。作为一个架构师,我们需要对系统未来如何应对变化负责。
下面是我的思考,你可以参考:
-
像 KV server 这样需要高性能的场景,通信应该优先考虑 TCP 协议。所以我们暂时只支持 TCP,未来可以根据需要支持更多的协议,如 HTTP2/gRPC。还有,未来可能对安全性有额外的要求,所以我们要保证 TLS 这样的安全协议可以即插即用。总之,网络层需要灵活。
-
应用层协议我们可以用 protobuf 定义。protobuf 直接解决了协议的定义以及如何序列化和反序列化。Redis 的 RESP 固然不错,但它的短板也显而易见,命令需要额外的解析,而且大量的 \r\n 来分隔命令或者数据,也有些浪费带宽。使用 JSON 的话更加浪费带宽,且 JSON 的解析效率不高,尤其是数据量很大的时候。
protobuf 就很适合 KV server 这样的场景,灵活、可向后兼容式升级、解析效率很高、生成的二进制非常省带宽,唯一的缺点是需要额外的工具 protoc 来编译成不同的语言。虽然 protobuf 是首选,但也许未来为了和 Redis 客户端互通,还是要支持 RESP。
-
服务器支持的命令我们可以参考Redis 的命令集。第一版先来支持 HXXX 命令,比如 HSET、HMSET、HGET、HMGET 等。从命令到命令的响应,可以做个 trait 来抽象。
-
处理流程中计划加这些 hook:收到客户端的命令后 OnRequestReceived、处理完客户端的命令后 OnRequestExecuted、发送响应之前 BeforeResponseSend、发送响应之后 AfterResponseSend。这样,处理过程中的主要步骤都有事件暴露出去,让我们的 KV server 可以非常灵活,方便调用者在初始化服务的时候注入额外的处理逻辑。
-
存储必然需要足够灵活。可以对存储做个 trait 来抽象其基本的行为,一开始可以就只做 MemDB,未来肯定需要有支持持久化的存储。
-
需要支持配置,但优先级不高。等基本流程搞定,使用过程中发现足够的痛点,就可以考虑配置文件如何处理了。
当这些问题都敲定下来,系统的基本思路就有了。
主体交互接口
我们可以先把几个重要的接口定义出来,然后仔细审视这些接口。
客户端和服务器间的协议
首先是客户端和服务器之间的协议。
来试着用 protobuf 定义一下我们第一版支持的客户端命令:
syntax = "proto3";
package abi;
// 来自客户端的命令请求
message CommandRequest {
oneof request_data {
Hget hget = 1;
Hgetall hgetall = 2;
Hmget hmget = 3;
Hset hset = 4;
Hmset hmset = 5;
Hdel hdel = 6;
Hmdel hmdel = 7;
Hexist hexist = 8;
Hmexist hmexist = 9;
}
}
// 服务器的响应
message CommandResponse {
// 状态码;复用 HTTP 2xx/4xx/5xx 状态码
uint32 status = 1;
// 如果不是 2xx,message 里包含详细的信息
string message = 2;
// 成功返回的 values
repeated Value values = 3;
// 成功返回的 kv pairs
repeated Kvpair pairs = 4;
}
// 从 table 中获取一个 key,返回 value
message Hget {
string table = 1;
string key = 2;
}
// 从 table 中获取所有的 Kvpair
message Hgetall { string table = 1; }
// 从 table 中获取一组 key,返回它们的 value
message Hmget {
string table = 1;
repeated string keys = 2;
}
// 返回的值
message Value {
oneof value {
string string = 1;
bytes binary = 2;
int64 integer = 3;
double float = 4;
bool bool = 5;
}
}
// 返回的 kvpair
message Kvpair {
string key = 1;
Value value = 2;
}
// 往 table 里存一个 kvpair,
// 如果 table 不存在就创建这个 table
message Hset {
string table = 1;
Kvpair pair = 2;
}
// 往 table 中存一组 kvpair,
// 如果 table 不存在就创建这个 table
message Hmset {
string table = 1;
repeated Kvpair pairs = 2;
}
// 从 table 中删除一个 key,返回它之前的值
message Hdel {
string table = 1;
string key = 2;
}
// 从 table 中删除一组 key,返回它们之前的值
message Hmdel {
string table = 1;
repeated string keys = 2;
}
// 查看 key 是否存在
message Hexist {
string table = 1;
string key = 2;
}
// 查看一组 key 是否存在
message Hmexist {
string table = 1;
repeated string keys = 2;
}
通过 prost,这个 protobuf 文件可以被编译成 Rust 代码(主要是 struct 和 enum),供我们使用。你应该还记得,thumbor 的开发时,已经见识到了 prost 处理 protobuf 的方式了。
CommandService trait
客户端和服务器间的协议敲定之后,就要思考如何处理请求的命令,返回响应。
-
我们目前打算支持 9 种命令,未来可能支持更多命令。所以最好定义一个 trait 来统一处理所有的命令,返回处理结果。
-
在处理命令的时候,需要和存储发生关系,这样才能根据请求中携带的参数读取数据,或者把请求中的数据存入存储系统中。
- 所以,这个 trait 可以这么定义:
/// 对 Command 的处理的抽象 pub trait CommandService { /// 处理 Command,返回 Response fn execute(self, store: &impl Storage) -> CommandResponse; }
有了这个 trait,并且每一个命令都实现了这个 trait 后,dispatch 方法就可以是类似这样的代码:
// 从 Request 中得到 Response,目前处理 HGET/HGETALL/HSET pub fn dispatch(cmd: CommandRequest, store: &impl Storage) -> CommandResponse { match cmd.request_data { Some(RequestData::Hget(param)) => param.execute(store), Some(RequestData::Hgetall(param)) => param.execute(store), Some(RequestData::Hset(param)) => param.execute(store), None => KvError::InvalidCommand("Request has no data".into()).into(), _ => KvError::Internal("Not implemented".into()).into(), } }
Storage trait
再来看为不同的存储而设计的 Storage trait,它提供 KV store 的主要接口
/// 对存储的抽象,我们不关心数据存在哪儿,但需要定义外界如何和存储打交道 pub trait Storage { /// 从一个 HashTable 里获取一个 key 的 value fn get(&self, table: &str, key: &str) -> Result<Option<Value>, KvError>; /// 从一个 HashTable 里设置一个 key 的 value,返回旧的 value fn set(&self, table: &str, key: String, value: Value) -> Result<Option<Value>, KvError>; /// 查看 HashTable 中是否有 key fn contains(&self, table: &str, key: &str) -> Result<bool, KvError>; /// 从 HashTable 中删除一个 key fn del(&self, table: &str, key: &str) -> Result<Option<Value>, KvError>; /// 遍历 HashTable,返回所有 kv pair(这个接口不好) fn get_all(&self, table: &str) -> Result<Vec<Kvpair>, KvError>; /// 遍历 HashTable,返回 kv pair 的 Iterator fn get_iter(&self, table: &str) -> Result<Box<dyn Iterator<Item = Kvpair>>, KvError>; }
trait的好处
在 CommandService trait 中已经看到,在处理客户端请求的时候,与之打交道的是 Storage trait,而非具体的某个 store。
这样做的好处是,未来根据业务的需要,在不同的场景下添加不同的 store,只需要为其实现 Storage trait 即可,不必修改 CommandService 有关的代码。
比如在 HGET 命令的实现时,我们使用 Storage::get 方法,从 table 中获取数据,它跟某个具体的存储方案无关
比如在 HGET 命令的实现时,我们使用 Storage::get 方法,从 table 中获取数据,它跟某个具体的存储方案无关
impl CommandService for Hget { fn execute(self, store: &impl Storage) -> CommandResponse { match store.get(&self.table, &self.key) { Ok(Some(v)) => v.into(), Ok(None) => KvError::NotFound(self.table, self.key).into(), Err(e) => e.into(), } } }
为什么get_iter返回Box?
/// 遍历 HashTable,返回 kv pair 的 Iterator fn get_iter(&self, table: &str) -> Result<Box<dyn Iterator<Item = Kvpair>>, KvError>;
Storage trait 里面的绝大多数方法相信你可以定义出来,但 get_iter() 这个接口可能你会比较困惑,因为它返回了一个 Box
这是一个 trait object。
这里我们想返回一个 iterator:
- 调用者不关心它具体是什么类型,只要可以不停地调用 next() 方法取到下一个值就可以了。
- 不同的实现,可能返回不同的 iterator,如果要用同一个接口承载,我们需要使用 trait object。
- 在使用 trait object 时,因为 Iterator 是个带有关联类型的 trait,所以这里需要指明关联类型 Item 是什么类型,这样调用者才好拿到这个类型进行处理。
你也许会有疑问,set / del 明显是个会导致 self 修改的方法,为什么它的接口依旧使用的是 &self 呢?
KV Server使用HashMap数据结构
我们思考一下它的用法。对于 Storage trait,最简单的实现是 in-memory 的 HashMap。
由于我们支持的是 HSET / HGET 这样的命令,它们可以从不同的表中读取数据,所以需要嵌套的 HashMap,类似 HashMap<String, HashMap<String, Value>>。
另外,由于要在多线程 / 异步环境下读取和更新内存中的 HashMap,所以我们需要类似这样的结构:
Arc<RwLock<HashMap<String, Arc<RwLock<HashMap<String, Value>>>>>>
这个结构是一个多线程环境下具有内部可变性的数据结构,所以 get / set 的接口是 &self 就足够了。